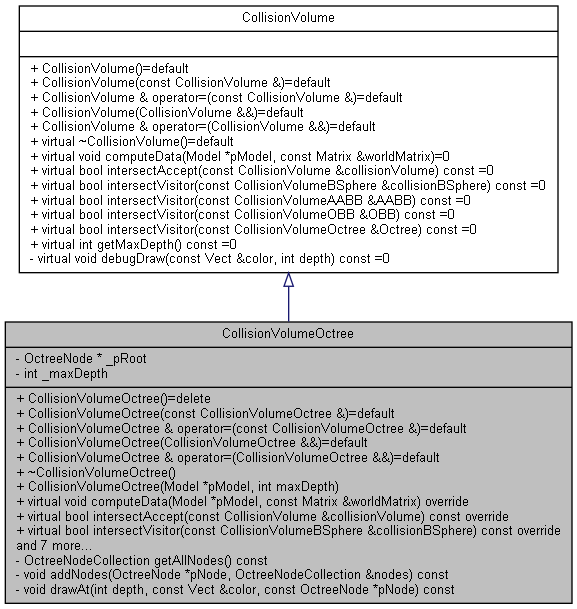
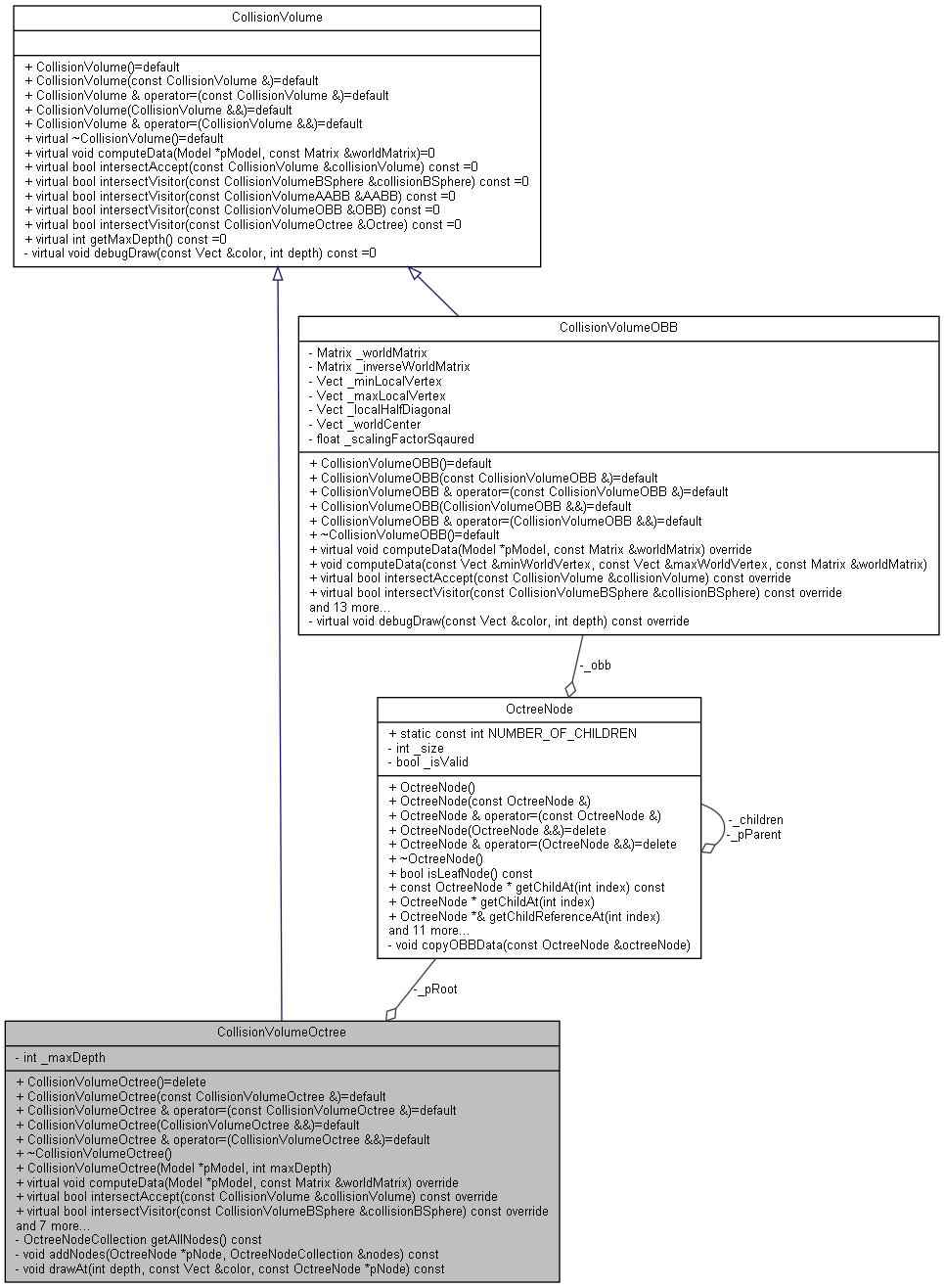
Public Member Functions | |
| CollisionVolumeOctree (const CollisionVolumeOctree &)=default | |
| CollisionVolumeOctree & | operator= (const CollisionVolumeOctree &)=default |
| CollisionVolumeOctree (CollisionVolumeOctree &&)=default | |
| CollisionVolumeOctree & | operator= (CollisionVolumeOctree &&)=default |
| CollisionVolumeOctree (Model *pModel, int maxDepth) | |
| virtual void | computeData (Model *pModel, const Matrix &worldMatrix) override |
| Calculates the data. More... | |
| virtual bool | intersectAccept (const CollisionVolume &collisionVolume) const override |
| Accepts a collision volume to perform intersect test. More... | |
| virtual bool | intersectVisitor (const CollisionVolumeBSphere &collisionBSphere) const override |
| Visits a collision volume BSphere to perform intersect test. More... | |
| virtual bool | intersectVisitor (const CollisionVolumeAABB &AABB) const override |
| Visits a collision volume AABB to perform intersect test. More... | |
| virtual bool | intersectVisitor (const CollisionVolumeOBB &OBB) const override |
| Visits a collision volume OBB to perform intersect test. More... | |
| virtual bool | intersectVisitor (const CollisionVolumeOctree &) const override |
| Visits a collision volume Octree to perform intersect test. More... | |
| virtual void | debugDraw (const Vect &color, int depth) const override |
| Draws it collision volume. More... | |
| void | debugDraw (int depth, const Vect &color) const |
| const OctreeNode * | getRoot () const |
| virtual int | getMaxDepth () const override |
 Public Member Functions inherited from CollisionVolume Public Member Functions inherited from CollisionVolume | |
| CollisionVolume (const CollisionVolume &)=default | |
| CollisionVolume & | operator= (const CollisionVolume &)=default |
| CollisionVolume (CollisionVolume &&)=default | |
| CollisionVolume & | operator= (CollisionVolume &&)=default |
Private Types | |
| typedef std::vector< OctreeNode * > | OctreeNodeCollection |
Private Member Functions | |
| OctreeNodeCollection | getAllNodes () const |
| void | addNodes (OctreeNode *pNode, OctreeNodeCollection &nodes) const |
| void | drawAt (int depth, const Vect &color, const OctreeNode *pNode) const |
Private Attributes | |
| OctreeNode * | _pRoot |
| int | _maxDepth |
Member Function Documentation
◆ computeData()
|
overridevirtual |
Calculates the data.
- Parameters
-
pModel [in,out] If non-null, the model. worldMatrix The world matrix.
Implements CollisionVolume.
◆ debugDraw()
|
overridevirtual |
Draws it collision volume.
Used for debuggin purposes. Depth value is used only for Octree collision value. All other collision volumes ignore it.
- Parameters
-
color the color to render the collision volume. depth the depth to render collision volume.
Implements CollisionVolume.
◆ intersectAccept()
|
overridevirtual |
Accepts a collision volume to perform intersect test.
Uses Visitor Pattern. This is the first step of the process. Then calls on intersectVisitor().
- Parameters
-
collisionVolume a collision volume.
Implements CollisionVolume.
◆ intersectVisitor() [1/4]
|
overridevirtual |
Visits a collision volume AABB to perform intersect test.
Uses Visitor Pattern. This is the second step of the process.
- Parameters
-
AABB a collision volume AABB.
Implements CollisionVolume.
◆ intersectVisitor() [2/4]
|
overridevirtual |
Visits a collision volume BSphere to perform intersect test.
Uses Visitor Pattern. This is the second step of the process.
- Parameters
-
collisionBSphere a collision volume BSphere.
Implements CollisionVolume.
◆ intersectVisitor() [3/4]
|
overridevirtual |
Visits a collision volume OBB to perform intersect test.
Uses Visitor Pattern. This is the second step of the process.
- Parameters
-
OBB a collision volume OBB.
Implements CollisionVolume.
◆ intersectVisitor() [4/4]
|
overridevirtual |
Visits a collision volume Octree to perform intersect test.
Uses Visitor Pattern. This is the second step of the process.
- Parameters
-
Octree a collision volume Octree.
Implements CollisionVolume.
The documentation for this class was generated from the following files:
- CollisionVolumeOctree.h
- CollisionVolumeOctree.cpp