A Collision Volume AABB. More...
#include <CollisionVolumeAABB.h>
Public Member Functions | |
| CollisionVolumeAABB (const CollisionVolumeAABB &)=default | |
| CollisionVolumeAABB & | operator= (const CollisionVolumeAABB &)=default |
| CollisionVolumeAABB (CollisionVolumeAABB &&)=default | |
| CollisionVolumeAABB & | operator= (CollisionVolumeAABB &&)=default |
| virtual void | computeData (Model *pModel, const Matrix &worldMatrix) override |
| Calculates the data for AABB. In this case the Max and Min Vertices. More... | |
| void | computeData (const CollisionVolumeBSphere &BSphere) |
| Calculates the data for AABB. In this case the Max and Min Vertices. More... | |
| virtual bool | intersectAccept (const CollisionVolume &) const override |
| Accepts a collision volume to perform intersect test. More... | |
| virtual bool | intersectVisitor (const CollisionVolumeBSphere &) const override |
| Visits a collision volume BSphere to perform intersect test. More... | |
| virtual bool | intersectVisitor (const CollisionVolumeAABB &) const override |
| Visits a collision volume AABB to perform intersect test. More... | |
| virtual bool | intersectVisitor (const CollisionVolumeOBB &) const override |
| Visits a collision volume OBB to perform intersect test. More... | |
| virtual bool | intersectVisitor (const CollisionVolumeOctree &) const override |
| Visits a collision volume Octree to perform intersect test. More... | |
| void | setMinMaxWorldVertex (const Vect &minWorldVertex, const Vect &maxWorldVertex) |
| Sets the minimum and maximum vertex in world space. More... | |
| const Vect & | getMinWorldVertex () const |
| Gets the minimum vertex in world space. More... | |
| const Vect & | getMaxWorldVertex () const |
| Gets the maximum vertex in world space. More... | |
| const Matrix & | getWorldMatrix () const |
| Gets the world matrix of AABB. More... | |
| const Matrix & | getInverseWorldMatrix () const |
| Gets the inverse world matrix of AABB. More... | |
| const Vect & | getMinLocalVertex () const |
| Gets the minimum vertex in local space. More... | |
| const Vect & | getMaxLocalVertex () const |
| Gets the maximum vertex in local space. More... | |
| const Vect & | getLocalHalfDiagonal () const |
| Gets the half diagonal of AABB in local space. More... | |
| const Vect & | getWorldCenter () const |
| Gets the center position of AABB in world space. More... | |
| float | getScalingFactorSquared () const |
| Gets scaling factor sqaured of AABB. More... | |
| void | computeData (const CollisionVolumeOBB &OBB) |
| Calculates the data for AABB. In this case the Max and Min Vertices. More... | |
| void | computeData (const Triangle &triangle) |
| Calculates the data for AABB. In this case the Max and Min Vertices. More... | |
| virtual int | getMaxDepth () const override |
 Public Member Functions inherited from CollisionVolume Public Member Functions inherited from CollisionVolume | |
| CollisionVolume (const CollisionVolume &)=default | |
| CollisionVolume & | operator= (const CollisionVolume &)=default |
| CollisionVolume (CollisionVolume &&)=default | |
| CollisionVolume & | operator= (CollisionVolume &&)=default |
Private Member Functions | |
| virtual void | debugDraw (const Vect &color, int depth) const override |
| Draws it collision volume. More... | |
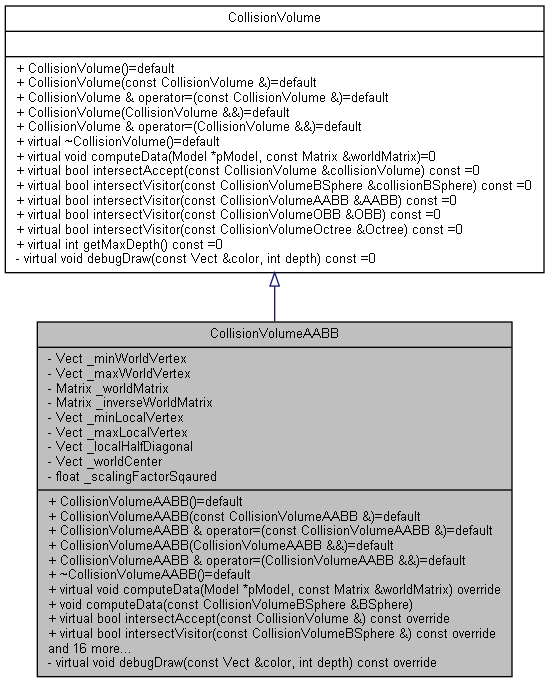
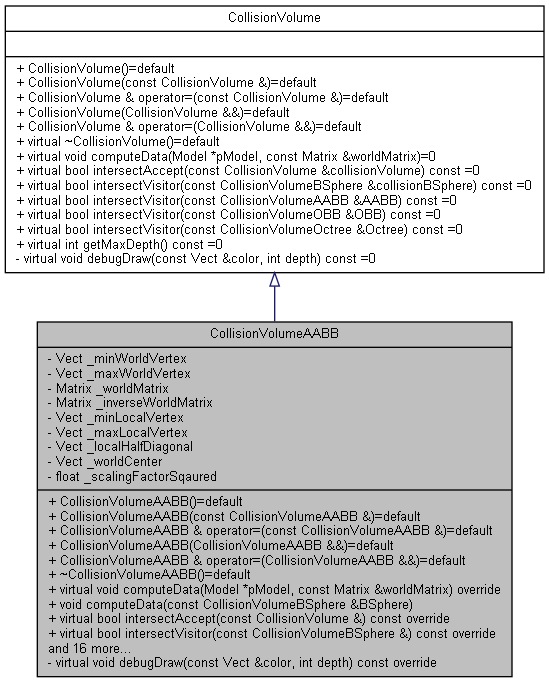
Detailed Description
A Collision Volume AABB.
inherits from CollisionVolume.
Member Function Documentation
◆ computeData() [1/4]
| void CollisionVolumeAABB::computeData | ( | const CollisionVolumeBSphere & | BSphere | ) |
Calculates the data for AABB. In this case the Max and Min Vertices.
Uses a BSphere.
- Parameters
-
bSphere A BSphere.
◆ computeData() [2/4]
| void CollisionVolumeAABB::computeData | ( | const CollisionVolumeOBB & | OBB | ) |
Calculates the data for AABB. In this case the Max and Min Vertices.
Uses a OBB.
- Parameters
-
OBB A OBB.
◆ computeData() [3/4]
| void CollisionVolumeAABB::computeData | ( | const Triangle & | triangle | ) |
◆ computeData() [4/4]
|
overridevirtual |
Calculates the data for AABB. In this case the Max and Min Vertices.
- Parameters
-
pModel the pointer to a model. worldMatrix The world matrix.
Implements CollisionVolume.
◆ debugDraw()
|
overrideprivatevirtual |
Draws it collision volume.
Used for debuggin purposes. Depth value is used only for Octree collision value. All other collision volumes ignore it.
- Parameters
-
color the color to render the collision volume. depth the depth to render collision volume.
Implements CollisionVolume.
◆ getInverseWorldMatrix()
| const Matrix & CollisionVolumeAABB::getInverseWorldMatrix | ( | ) | const |
Gets the inverse world matrix of AABB.
- Returns
- The world matrix.
◆ getLocalHalfDiagonal()
| const Vect & CollisionVolumeAABB::getLocalHalfDiagonal | ( | ) | const |
Gets the half diagonal of AABB in local space.
- Returns
- The half diagonal.
◆ getMaxLocalVertex()
| const Vect & CollisionVolumeAABB::getMaxLocalVertex | ( | ) | const |
Gets the maximum vertex in local space.
- Returns
- The maximum vertex.
◆ getMaxWorldVertex()
| const Vect & CollisionVolumeAABB::getMaxWorldVertex | ( | ) | const |
Gets the maximum vertex in world space.
- Returns
- The maximum vertex.
◆ getMinLocalVertex()
| const Vect & CollisionVolumeAABB::getMinLocalVertex | ( | ) | const |
Gets the minimum vertex in local space.
- Returns
- The minimum vertex.
◆ getMinWorldVertex()
| const Vect & CollisionVolumeAABB::getMinWorldVertex | ( | ) | const |
Gets the minimum vertex in world space.
- Returns
- The minimum vertex.
◆ getScalingFactorSquared()
| float CollisionVolumeAABB::getScalingFactorSquared | ( | ) | const |
Gets scaling factor sqaured of AABB.
- Returns
- The scaling factor squared.
◆ getWorldCenter()
| const Vect & CollisionVolumeAABB::getWorldCenter | ( | ) | const |
Gets the center position of AABB in world space.
- Returns
- The center.
◆ getWorldMatrix()
| const Matrix & CollisionVolumeAABB::getWorldMatrix | ( | ) | const |
Gets the world matrix of AABB.
- Returns
- The world matrix.
◆ intersectAccept()
|
overridevirtual |
Accepts a collision volume to perform intersect test.
Uses Visitor Pattern. This is the first step of the process. Then calls on intersectVisitor().
- Parameters
-
collisionVolume a collision volume.
Implements CollisionVolume.
◆ intersectVisitor() [1/4]
|
overridevirtual |
Visits a collision volume AABB to perform intersect test.
Uses Visitor Pattern. This is the second step of the process.
- Parameters
-
AABB a collision volume AABB.
Implements CollisionVolume.
◆ intersectVisitor() [2/4]
|
overridevirtual |
Visits a collision volume BSphere to perform intersect test.
Uses Visitor Pattern. This is the second step of the process.
- Parameters
-
collisionBSphere a collision volume BSphere.
Implements CollisionVolume.
◆ intersectVisitor() [3/4]
|
overridevirtual |
Visits a collision volume OBB to perform intersect test.
Uses Visitor Pattern. This is the second step of the process.
- Parameters
-
OBB a collision volume OBB.
Implements CollisionVolume.
◆ intersectVisitor() [4/4]
|
overridevirtual |
Visits a collision volume Octree to perform intersect test.
Uses Visitor Pattern. This is the second step of the process.
- Parameters
-
Octree a collision volume Octree.
Implements CollisionVolume.
◆ setMinMaxWorldVertex()
| void CollisionVolumeAABB::setMinMaxWorldVertex | ( | const Vect & | minWorldVertex, |
| const Vect & | maxWorldVertex | ||
| ) |
Sets the minimum and maximum vertex in world space.
- Parameters
-
minWorldVertex The min world vertex. maxWorldVertex The max world vertex.
The documentation for this class was generated from the following files:
- CollisionVolumeAABB.h
- CollisionVolumeAABB.cpp